Snapdragon Flight에서 카메라 사용하기
아래 방향을 향하는 gray-scale 카메라는 optical flow기반의 positioin stabilization에 사용되고 정면을 향하는 RGB 카메라가 있습니다. snap_cam repo는 카메라 실행 및 스트리밍 및 optical flow를 계산하는 방법을 제공합니다.
카메라 뿐만 아니라, optical flow는 아래 방향으로 거리 센서가 필요합니다. 여기서는 TeraRanger One을 사용하는 방법에 대해서 논의해 봅니다.
Optical Flow
optical flow는 어플리케이션 프로세서에서 계산하며 Mavlink를 통해 PX4로 전달됩니다. readme에 있는 지시에 따라 snap_cam repo를 clone하고 컴파일합니다.
root 권한으로 optical flow 어플리케이션을 실행:
optical_flow -n 50 -f 30
optical flow 어플리케이션은 PX4에게 IMU Mavlink 메시지를 요청합니다. 추가적인 Mavlink 인스턴스를 PX4에 추가하기 위해서는 다음을 mainapp.config에 추가해야할 수도 있습니다 :
mavlink start -u 14557 -r 1000000 -t 127.0.0.1 -o 14558
mavlink stream -u 14557 -s HIGHRES_IMU -r 250
TeraRanger One 셋업
TeraRanger One (TROne)을 Snapdragon Flight에 연결하기 위해서, TROne I2C 아답터를 반드시 사용해야만 합니다. TROne는 반드시 벤더가 제공하는 I2C 펌웨어로 플래쉬해야만 합니다.
TROne은 커스텀 DF13 4-to-6 핀 케이블을 통해서 Snapdragon Flight에 연결합니다. J15 커넥터(USB 옆)를 사용하는 것을 추천하며 다른 것들은(RC, ESC, GPS) 이미 사용 중입니다. 연결은 다음과 같습니다 :
| 4 pin | <-> | 6 pin |
|---|---|---|
| 1 | 1 | |
| 2 | 6 | |
| 3 | 4 | |
| 4 | 5 |
TROne은 반드시 10 - 20V 전압을 사용해야 합니다.
QGroundControl에서 카메라 스트리밍
카메라의 라이브 스트림을 보기 위해서 qcamvid를 사용합니다. 720p 해상도 레코딩 없이 10분동안 카메라 스트림을 위해서 Snapdragon Flight에 다음 명령을 실행합니다.
qcamvid -c hires -r 720p -s -t 600
qcamvid -h을 사용하면 모든 옵션을 볼 수 있습니다.
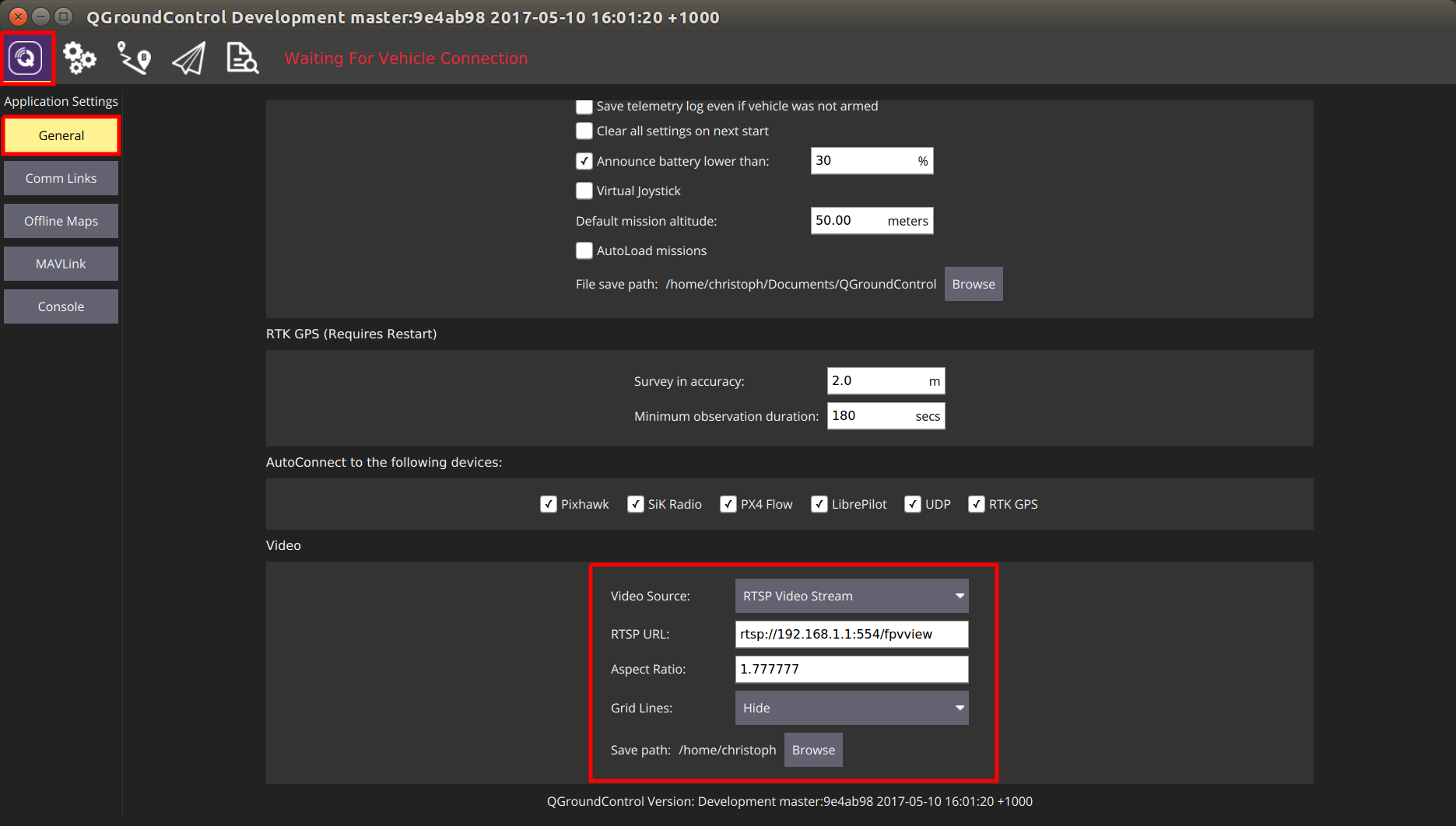
라이브 스트림을 QGroundControl에서 보기 위해서는 gstreamer로 빌드해야만 합니다. (여기를 참고하세요)
일단 Snapdragon Flight의 네트워크에 설치하고 연결되면, QGroundControl은 다음과 같이 변경됩니다.