Snapdragon Flight Autopilot
Snapdragon Flight 플랫폼은 하이엔드 autopilot / 온보드 컴퓨터로 PX4 Flight Stack을 QuRT 실시간 운영체제가 돌아가는 DSP에서 실행됩니다. 이때 POSIX 호환을 위해서 DSPAL API을 사용합니다. Pixhawk와 비교하면 카메라와 WiFi 그리고 하이엔드 프로세싱 파워, IO가 다릅니다.
Snapdragon Flight 플랫폼에 관한 보다 상세한 정보는 Snapdragon-Flight-Details을 참고하세요.

간략 요약
- System-on-Chip: Snapdragon 801
- CPU: Quad-core 2.26 GHz Krait
- DSP: Hexagon DSP (QDSP6 V5A) – 801 MHz+256KL2 (flight 코드 실행)
- GPU: Qualcomm® Adreno™ 330 GPU
- RAM: 2GB LPDDR3 PoP @931 MHz
- Storage: 32GB eMMC Flash
- Video: Sony IMX135 on Liteon Module 12P1BAD11
- 4k@30fps 3840×2160 video capture to SD card with H.264 @ 100Mbits (1080p/60 with parallel FPV), 720p FPV
- Optic Flow: Omnivision OV7251 on Sunny Module MD102A-200
- 640x480 @ 30/60/90 fps
- Wifi: Qualcomm® VIVE™ 1-stream 802.11n/ac with MU-MIMO † Integrated digital core
- BT/WiFi: BT 4.0 and 2G/5G WiFi via QCA6234
- 802.11n, 2×2 MIMO with 2 uCOAX connectors on-board for connection to external antenna
- GPS: Telit Jupiter SE868 V2 module (use of an external u-Blox module is recommended by PX4 instead)
- uCOAX connector on-board for connection to external GPS patch antenna
- CSR SiRFstarV @ 5Hz via UART
- Accelerometer / Gyro / Mag: Invensense MPU-9250 9-Axis Sensor, 3x3mm QFN, on bus SPI1
- Baro: Bosch BMP280 barometric pressure sensor, on bus I2C3
- Power: 5VDC via external 2S-6S battery regulated down to 5V via APM adapter
- 구입: Intrinsyc Store
추천 셋업
다음 셋업으로 Snapdragon Flight 사용합니다.
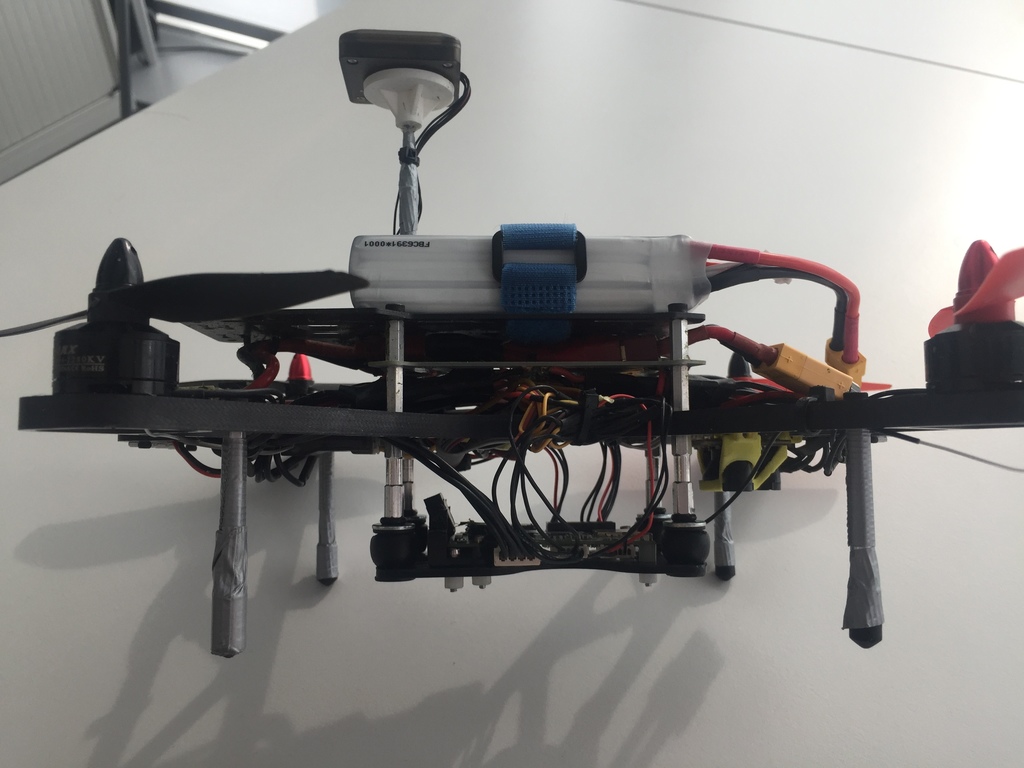
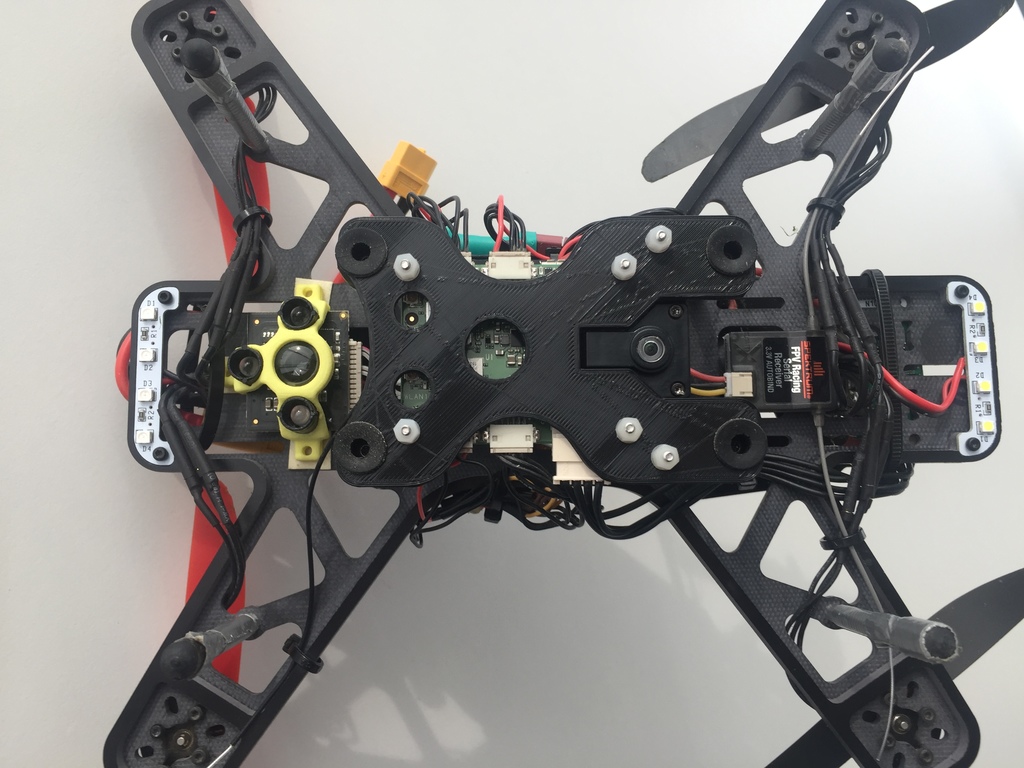
컴포넌트
- Quantum Falcon 250
- 3DR PIXHAWK MINI GPS
- Trone range finder
- Spektrum DXe and FPV Racing Serial Receiver (3.3V Autobind)
상세한 배선은 아래와 같습니다.
Snapdragon Flight에 마운트하기 위해서 커스텀 보드와 카메라 마운트를 사용할 수 있습니다.(optical flow camera mount는 최신 보드에 사용할 수 없습니다):
- 보드 마운팅 판, for 5mm dampers
- 보드 마운팅 판, for 7mm dampers
- Hires 카메라 마운트, 파트 1
- Hires 카메라 마운트, 파트 2
- Optical flow 카메라 마운트
hires 카메라 마운트를 조립하기 위해서, 추가로 나사를(M2x6나 M1.6x6) 사용해야만 합니다.
특별히 셋업에서 these와 유사한 지름 7mm 마운팅 진동 댐퍼를 사용합니다. 추가로 다음과 같은 것들이 필요합니다:
- Screws, M3x12
- O-rings, 3mm 내부 지름
- M3 washers, ~9mm 내부용
- M3 washers, ~12mm 외부용


Connectivity
- 1개 USB 3.0 OTG 포트 (micro-A/B)
- Micro SD 카드 슬롯
- 짐벌 커넥터 (PWB/GND/BLSP)
- ESC 커넥터 (2W UART)
- I2C
- 60-pin 고속 Samtec QSH-030-01-L-D-A-K 확장 커넥터
- 2x BLSP (BAM 저속 주변장치)
- USB
Pinouts
비록 Snapdragon은 DF13 커넥터를 사용하짐나 pinout은 Pixhawk와 다릅니다.
상세 pinout 정보는 여기 참고 : Qualcomm Developer Network.
WiFi
- WLAN0, WLAN1 (+BT 4.0): U.FL 커넥터: Taoglas adhesive antenna (DigiKey)
커넥터
시리얼 포트의 기본 매핑은 다음과 같습니다. :
| Device | Description |
|---|---|
/dev/tty-1 |
J15 (next to USB) |
/dev/tty-2 |
J13 (next to power module connector) |
/dev/tty-3 |
J12 (next to J13) |
/dev/tty-4 |
J9 (next to J15) |
BAM 매핑에 대한 커스텀 UART은 "blsp.config"라는 파일을 생성하고 adb로 /usr/share/data/adsp에 넣습니다. 예로 기본 매핑을 유지하려면 여러분의 "blsp.config"은 다음과 같게 할 수도 있습니다. :
tty-1 bam-9 2-wire
tty-2 bam-6 2-wire
tty-3 bam-8 2-wire
tty-4 bam-2 2-wire
아래 테이블에서 지정한 TX와 RX pin만 UART가 사용도록 하고 싶으면 각 라인의 끝에 "2-wire" 문자를 포함하면 됩니다. 만약 2-wire를 지정하지 않으면(혹은 파일에 타겟에 없는 경우) UART는 기본적으로 4-wire 모드를 사용하고 RTS/CTS flow control을 위해서 추가로 2핀을 필요로 합니다. 이렇게 하면 동일한 커넥터 상에 있는 다른 I/O의 타입에도 문제가 발생할 수 있습니다. 만약 J9(아래 설명)가 UART가 I2C 장치 양쪽모두 연결되면, pin 4와 pin 6에 있는 I2C 신호는 I2C SDA와 SCL 신호를 사용하지 않고 RTS와 CTS 신호로 설정될 수 있습니다.
J9 / GPS
| Pin | 2-wire UART + I2C | 4-wire UART | SPI | Comment |
|---|---|---|---|---|
| 1 | 3.3V | 3.3V | 3.3V | |
| 2 | UART2_TX | UART2_TX | SPI2_MOSI | Output (3.3V) |
| 3 | UART2_RX | UART2_RX | SPI2_MISO | Input (3.3V) |
| 4 | I2C2_SDA | UART2_RTS | SPI2_CS | (3.3V) |
| 5 | GND | GND | GND | |
| 6 | I2C2_SCL | UART2_CTS | SPI2_CLK | (3.3V) |
J12 / Gimbal bus
| Pin | 2-wire UART + GPIO | 4-wire UART | SPI | Comment |
|---|---|---|---|---|
| 1 | 3.3V | 3.3V | 3.3V | |
| 2 | UART8_TX | UART8_TX | SPI8_MOSI | Output (3.3V) |
| 3 | UART8_RX | UART8_RX | SPI8_MISO | Input (3.3V) |
| 4 | APQ_GPIO_47 | UART8_RTS | SPI8_CS | (3.3V) |
| 5 | GND | GND | GND | |
| 6 | APQ_GPIO_48 | UART8_CTS | SPI8_CLK | (3.3V) |
J13 / ESC bus
| Pin | 2-wire UART + GPIO | 4-wire UART | SPI | Comment |
|---|---|---|---|---|
| 1 | 5V | 5V | 5V | |
| 2 | UART6_TX | UART6_TX | SPI6_MOSI | Output (5V) |
| 3 | UART6_RX | UART6_RX | SPI6_MISO | Input (5V) |
| 4 | APQ_GPIO_29 | UART6_RTS | SPI6_CS | (5V) |
| 5 | GND | GND | GND | |
| 6 | APQ_GPIO_30 | UART6_CTS | SPI6_CLK | (5V) |
J14 / Power
| Pin | Signal | Comment |
|---|---|---|
| 1 | 5V DC | Power input |
| 2 | GND | |
| 3 | I2C3_SCL | (5V) |
| 4 | I2C3_SDA | (5V) |
J15 / Radio Receiver / Sensors
| Pin | 2-wire UART + I2C | 4-wire UART | SPI | Comment |
|---|---|---|---|---|
| 1 | 3.3V | 3.3V | 3.3V | |
| 2 | UART9_TX | UART9_TX | SPI9_MOSI | Output |
| 3 | UART9_RX | UART9_RX | SPI9_MISO | Input |
| 4 | I2C9_SDA | UART9_RTS | SPI9_CS | |
| 5 | GND | GND | GND | |
| 6 | I2C9_SCL | UART9_CTS | SPI9_CLK |
주변장치
GPS 배선
비록 3DR GPS가 5v 입력을 받는다고 되어 있지만, 3.3V로도 잘 동작하는 걸로 보입니다. (빌트인 레귤레이터 MIC5205의 최소 동작 전압은 2.5v입니다.)
| Snapdragon J9 Pin | Signal | Comment | 3DR GPS 6pin/4pin | Pixfalcon GPS pin | 3DR PIXHAWK MINI GPS |
|---|---|---|---|---|---|
| 1 | 3.3V | (3.3V) | 1 | 4 | 3 (5V) |
| 2 | UART2_TX | Output (3.3V) | 2/- | 3 | 4 |
| 3 | UART2_RX | Input (3.3V) | 3/- | 2 | 5 |
| 4 | I2C2_SDA | (3.3V) | -/3 | 5 | 2 |
| 5 | GND | 6/- | 1 | 6 | |
| 6 | I2C2_SCL | (3.3V) | -/2 | 6 | 1 |
PWM ESC 배선
모터 제어를 위해서 PWM ESC를 사용할 수 있습니다. J13 커넥터(파워 모듈 커넥터 옆)를 사용해서 배선합니다. ESC 넘버는 여기를 참조하세요.
| Snapdragon J13 Pin | ESC | Comment |
|---|---|---|
| 1 | - | They already have voltage |
| 2 | 1 | Signal (orange) |
| 3 | 2 | Signal (orange) |
| 4 | 3 | Signal (orange) |
| 5 | GND | GND from all ESCs |
| 6 | 4 | Signal (orange) |
RC 배선
| Snapdragon J12 Pin | Spektrum receiver (3 pins) |
|---|---|
| 1 | 3.3 V |
| 2 | - |
| 3 | Signal |
| 4 | - |
| 5 | GND |
| 6 | - |
Trone Range Finder 배선
| Snapdragon J15 Pin | Trone (4 pins) |
|---|---|
| 1 | 1 |
| 2 | - |
| 3 | - |
| 4 | 3 |
| 5 | 4 |
| 6 | 2 |
상세 내용은 여기를 참고하세요.
UART to Pixracer / Pixfalcon Wiring
여기서 인터페이스는 Pixracer / Pixfalcon을 I/O 인터페이스 보드로 사용합니다. TELEM1 Pixfalcon에 연결하고 TELEM2 Pixracer에 연결합니다.
| Snapdragon J13 Pin | Signal | Comment | Pixfalcon / Pixracer Pin |
|---|---|---|---|
| 1 | 5V | Power for autopilot | 5V |
| 2 | UART6_TX | Output (5V) TX -> RX | 3 |
| 3 | UART6_RX | Input (5V) RX -> TX | 2 |
| 4 | APQ_GPIO_29 | (5V) | Not connected |
| 5 | GND | 6 | |
| 6 | APQ_GPIO_30 | (5V) | Not connected |
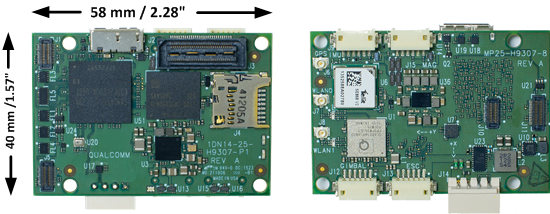
Dimensions