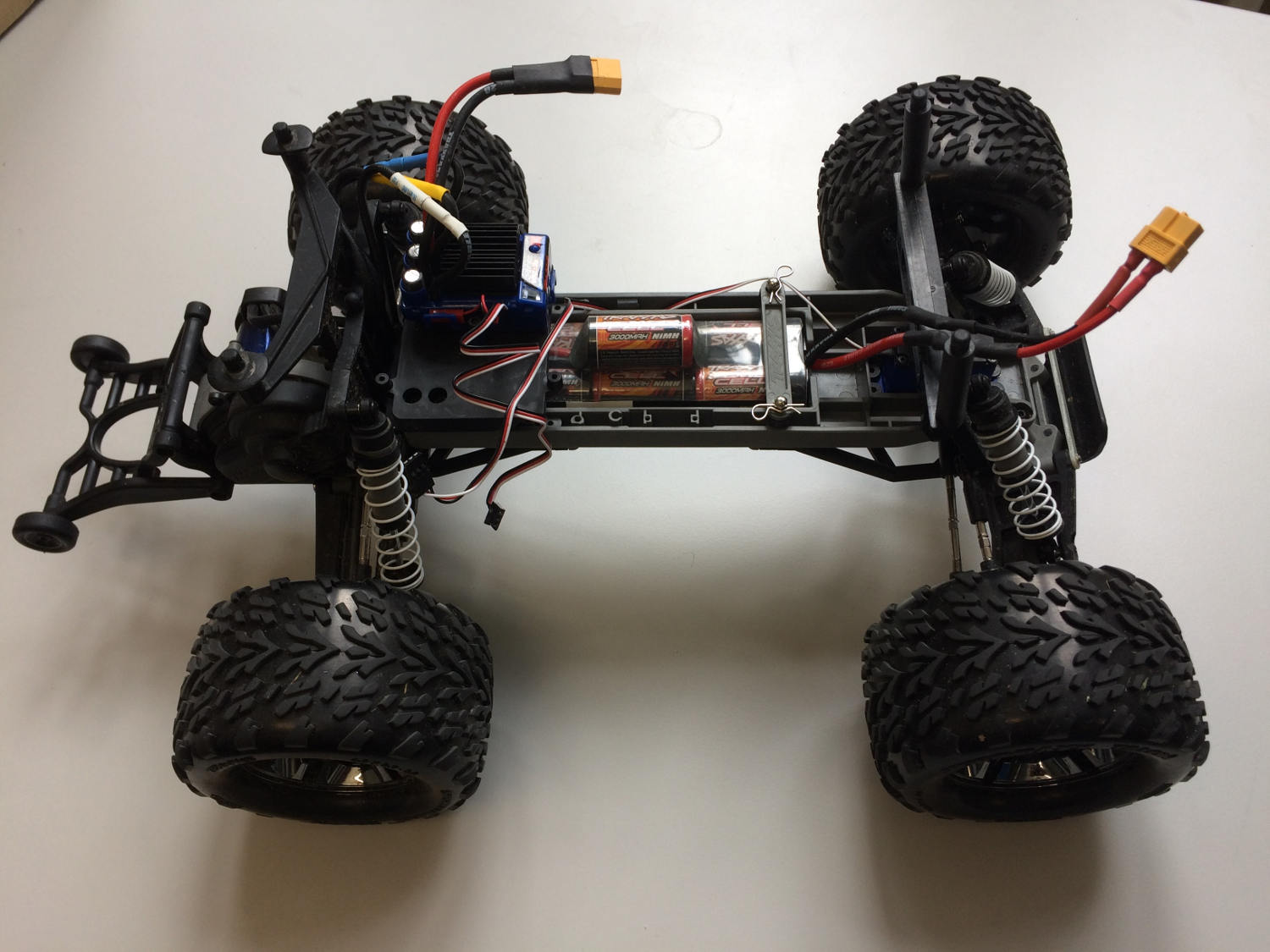
Traxxas Stampede VXL
이 비행체는 Pixhawk가 휠이 장착된 플랫폼에서 어떻게 사용될 수 있는지 보여주기 위해서 선택되었습니다. 매우 대중적이고 RC 커뮤니티에서 브랜드 인지도가 아주 높기 때문에 Traxxas를 선택하게 되었습니다. autopilot으로 휠이 달린 UGV를 쉽게 제어할 수 있는 플랫폼이라는 것이 아이디어입니다.

부품 목록
- Traxxas Stampede 상단 플라스틱 커버를 제외하고 여기 모든 것이 사용
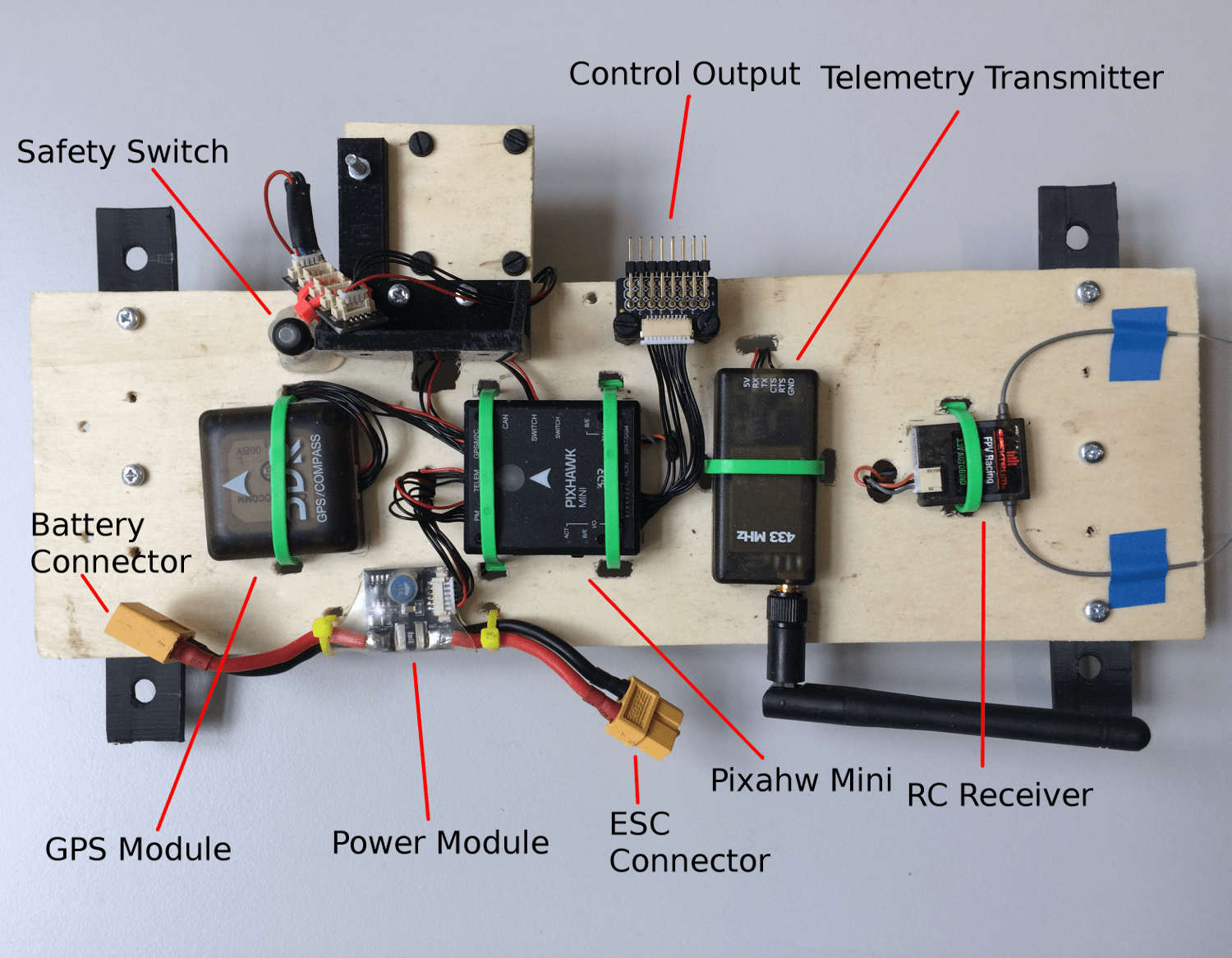
- Pixhawk Mini
- Power Module
- Telemetry Module (EU) US 버전은 해당 사이트에서 가능
- Spektrum Dxe Controller 혹은 다른 PX4 호환 리모트 콘트롤러
- Spektrum Quad Race Serial Receiver w/Diversity
- PX4Flow
조립
모든 autopilot 부품을 연결할 수 있는 나무 프레임으로 구성되어 있습니다. 테스트에서는 Pixhawk와 Flow 모듈을 위해서 진동을 더 잘 차단할 수 있는 것이 사용되었습니다.
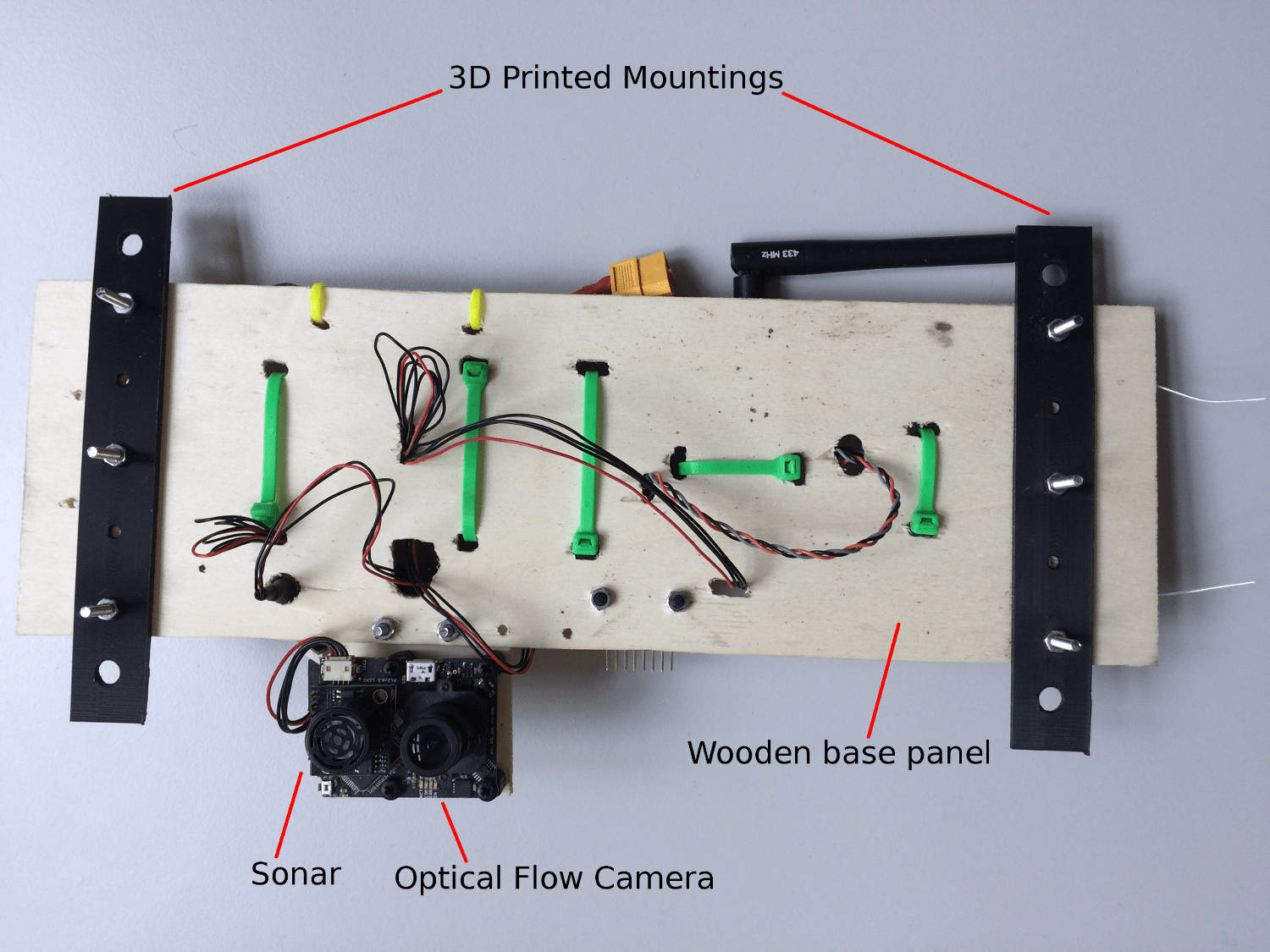

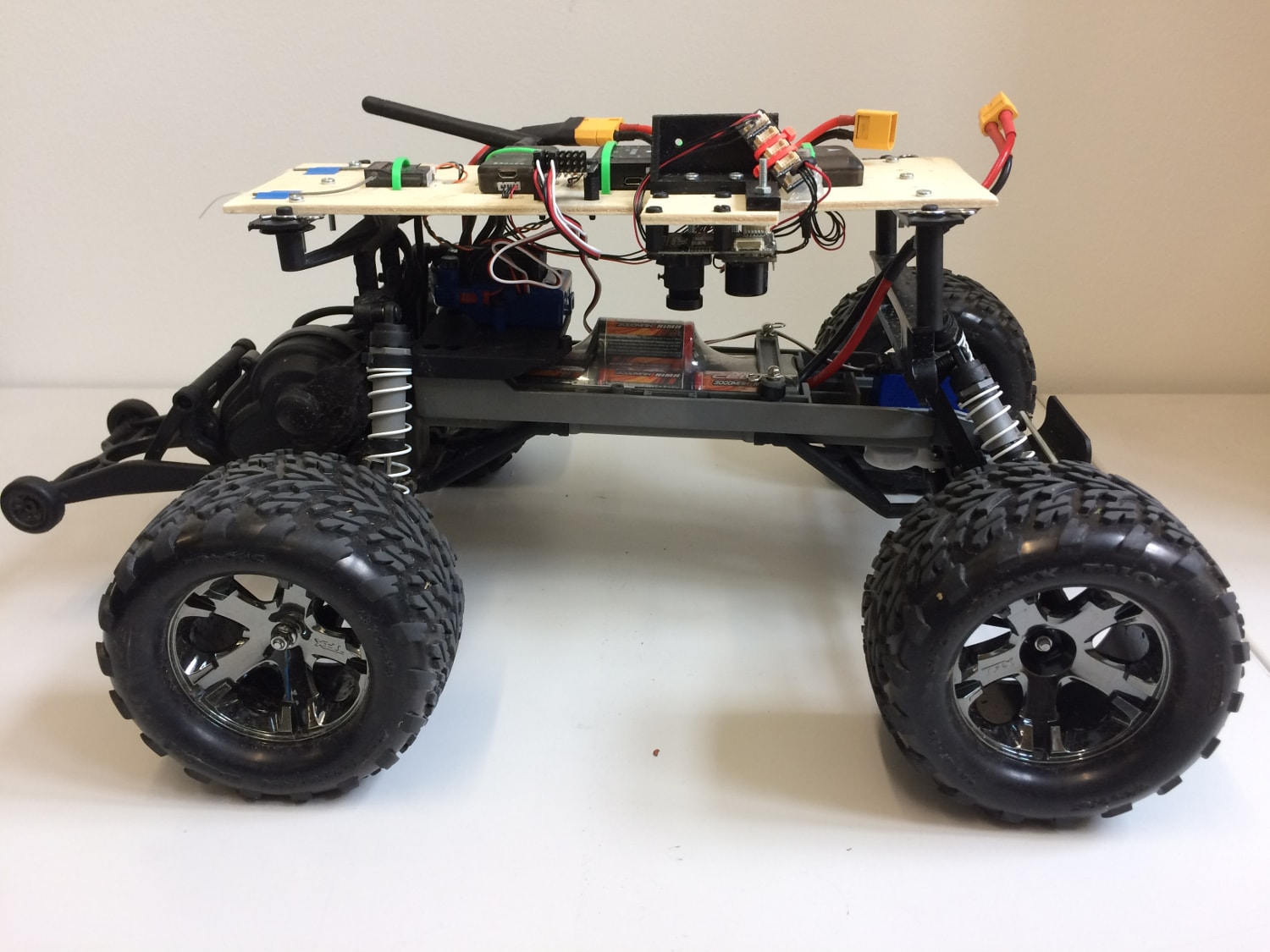
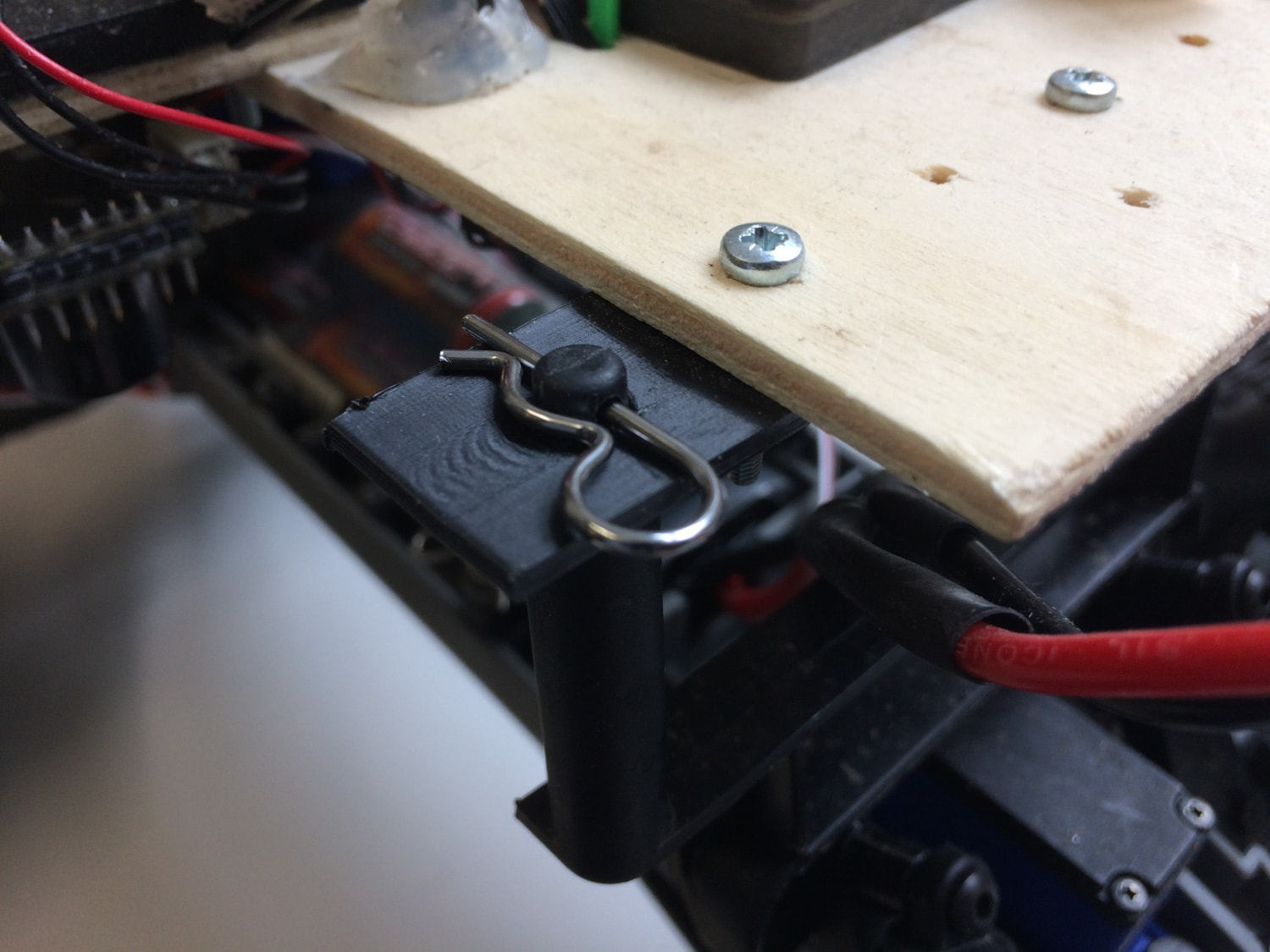
특수 마운팅을 위해서 상단 판을 붙이기 위해서 rover와 함께 제공된 clip을 사용하기로 결정했습니다. 이를 위해 3D 프린팅을 사용하였고 CAD 파일은 다음과 같습니다.
트레이닝 모드에서 ESC를 설정은 파워를 50% 줄여닌 것을 강력 추천 합니다.
Output connections
| PWM Output | Rate | Actuator |
|---|---|---|
| MAIN1 | 50 Hz | Not connected |
| MAIN2 | 50 Hz | Steering servo |
| MAIN3 | 50 Hz | Not Connected |
| MAIN4 | 50 Hz | ESC input |
| MAIN5 | 50 Hz | Not Connected |
| MAIN6 | 50 Hz | Not Connected |
| MAIN7 | 50 Hz | Not Connected |
| MAIN8 | 50 Hz | Not Connected |
Simulation
알고리즘을 테스트하기 위해서 시뮬레이션을 사용합니다. 다음과 같이 Firmware 폴더에서 실행할 수 있습니다.
make posix gazebo-rover
보다 자세한 내용은 Gazebo Simulation을 참고하세요.
사용
현재 PX4는 RC 리모트가 연결되는 경우 MISSION과 MANUAL 모드를 지원합니다. mission 모드를 사용하기 위해서 가장 먼저 QGC와 연결된 비행체에 새로운 mission을 업로드합니다. 다음으로 ARMING하기 전에, MISSION을 선택하고 arm을 수행합니다.
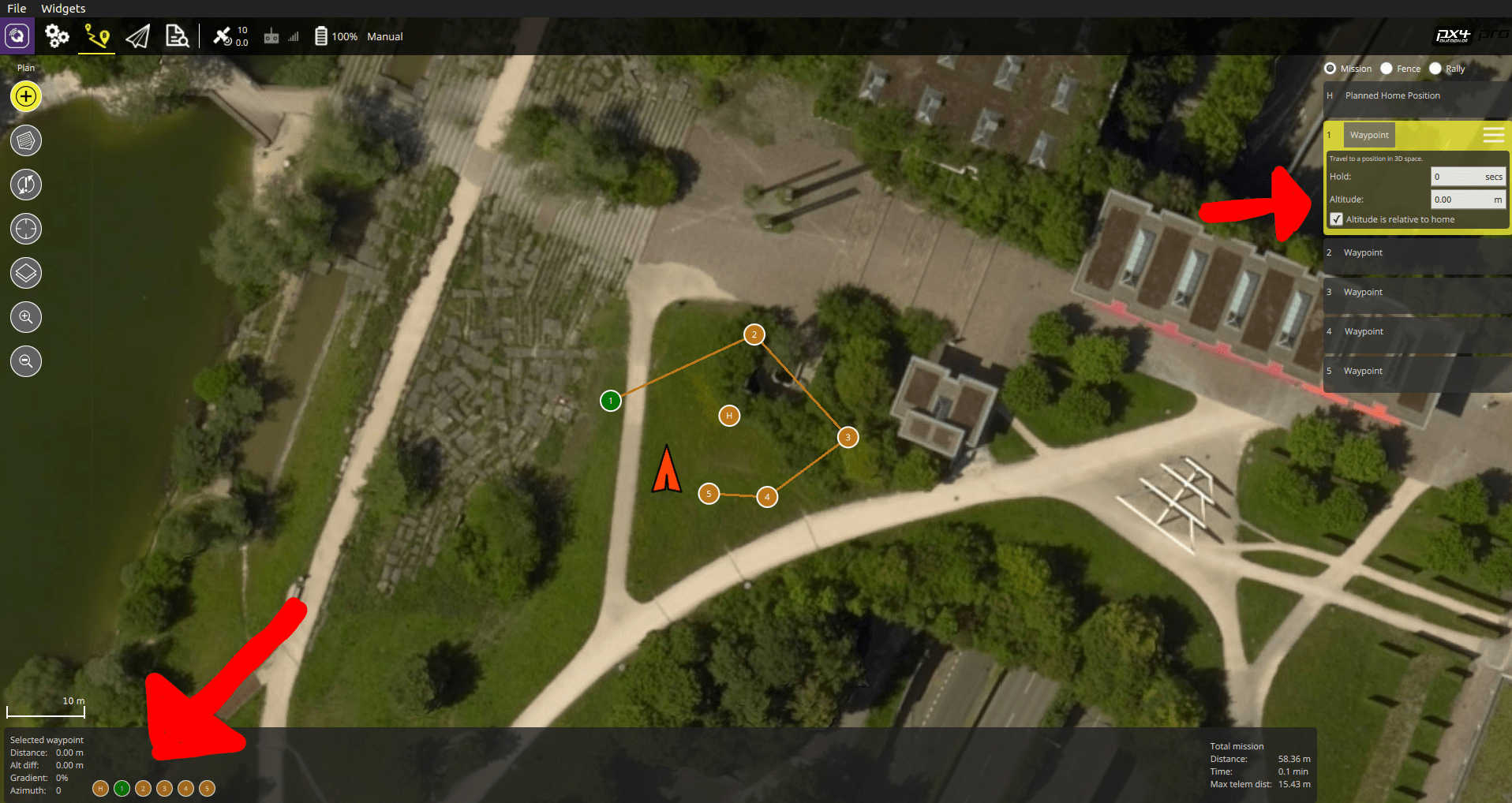
일반적인 waypoint로 만 mission을 설정할 수 있다는 것이 매우 중요 합니다. (예로 TAKEOFF WAYPOINTS가 없음) 그리고 제대로 수행하기 위해서는 모든 WAYPOINT의 높이를 0으로 설정 해야하는 것이 핵심입니다. 이렇게 하지 않으면 rover가 waypoint 주변을 계속 회전하게 됩니다.
올바른 미션 셋업 방법은 다음과 같습니다.
현재 개발 상태에서는 장애물 회피가 없습니다. 먼저 소프트웨어 사용법을 익히기 위해서 시뮬레이터로 mission을 테스트하는 것을 추천합니다.
펌웨어 만들기
펌웨어를 만들기 위해서 터미널을 사용해야합니다.(QGC는 아직 지원하지 않음) Building the Code section 지시를 따라서 진행하며 다음과 같이 실행하여 업로드합니다.
cd ~/src/Firmware
make px4fmu-v2_default upload
Parameters
현재 소프트웨어는 attitude 제어기와 position 제어기를 제공합니다. GPS 좌표(실제 혹은 가짜)를 따라 Ackerman steered 비행체를 이동시키기 위해서 고정익 프레임워크의 윗부분에 설치. 이를 위해 2 PID가 구현되어 있는데 steering과 속도에 각각 하나씩 입니다. 다음과 같은 일반 파라미터를 설정해서 시작시킬 수 있습니다. QGC로 설정할 수 있습니다. (방법은 여기참조):
- SYS_AUTOSTART 50002
- MAV_TYPE 10
- MIS_LTRMIN_ALT 0.01
- MIS_TAKEOFF_ALT 0.01
이제 Traxxas Stampede VXL를 위해 설정한 Pixhawk를 시작시킬 수 있습니다. steering 제어기는 다음 파라미터로 튜닝할 수 있습니다. :
- GND_WR_D 0.1
- GND_WR_I 0.01
- GND_WR_IMAX 0.1
- GND_WR_P 1.5
closed loop 속도 제어는 다음을 설정해서 가능합니다 :
- GND_SP_CTRL_MODE 1
다음 파라미터를 이용하면 두번째 PID를 사용해서 속도를 제어할 수 있습니다 :
- GND_SPEED_D 5
- GND_SPEED_I 0.01
- GND_SPEED_IMAX 0.5
- GND_SPEED_P 2.0
- GND_SPEED_THR_SC 0.1
- GND_SPEED_TRIM 4
만약 closed loop이 활성화되면 속도 제어기는 target 속도로 GND_SPEED_TRIM을 가지고 이를 추적할 수 있습니다. 반면에 GND_SP_CTRL_MODE가 0으로 설정되는 경우, 속도 제어기는 throttle의 안전 open loop 셋팅으로 전환될 것입니다. 다음 파라미터로 제어 :
- GND_THR_CRUISE 0.1
- GND_THR_IDLE 0
- GND_THR_MAX 0.5
- GND_THR_MIN 0
다음으로 일반 navigation 파라미터들은 더 사용성이 좋게 튜닝할 수 있습니다 :
- GND_L1_DIST 3
- NAV_ACC_RAD 0.5