MindPX 하드웨어
MindPX 시리즈는 AirMind에서 만들었습니다. http://mindpx.net 를 참고하세요.

간략 요약
메인 하드웨어 문서는 여기를 참고하세요.
MindPX는 Pixhawk에서 브랜치한 차세대 autopilot 시스템으로 회로도와 구조를 개선하고 무인비행체를 보다 스마트하고 사용하게 편리하게 하기 위해서 새로운 기능으로 개선하였습니다.
MindPX은 전체 PWM 출력 채널을 16까지 늘렸습니다. (8개 메인 출력 + 8 aux 출력) 이를 이용해서 MindPX는 보더 복잡한 VTOL 설정과 세밀한 조정을 지원합니다. FMU-V4 기반 flight controllers를 이용해서 단일 FMU로 main과 aux 출력을 구현했다는 점에서 특별한 의미가 있습니다.
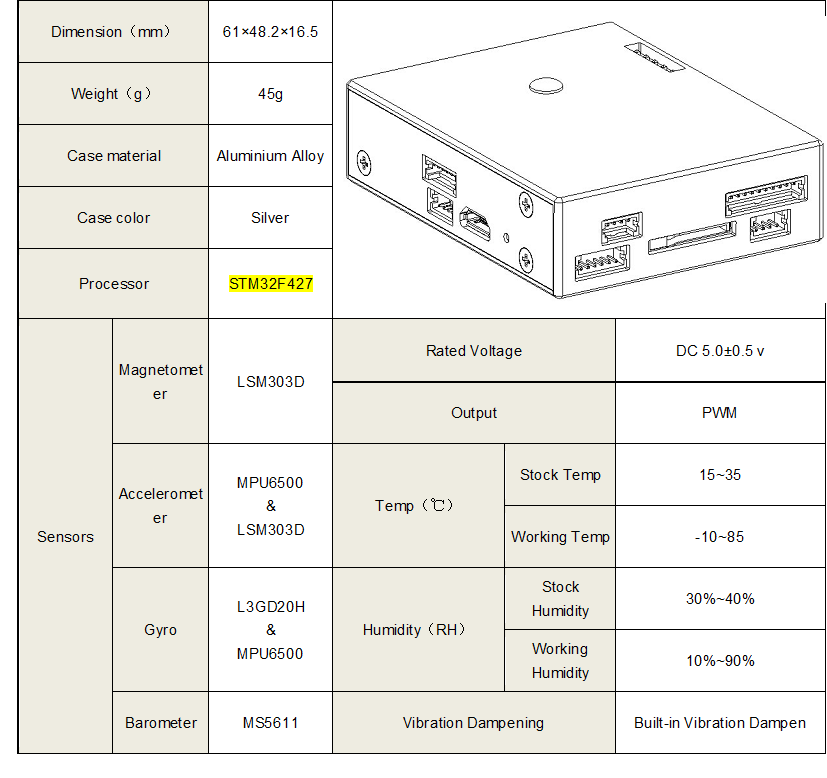
- Main System-on-Chip: STM32F427
- CPU: 32bits, 168 MHz ARM Cortex M4 with FPU
- RAM: 256 KB SRAM
- 2MB Flash
- ST Micro LSM303D 14 bit accelerometer/magnetometer
- MEAS MS5611 barometer
- InvenSense MPU6500 integrated 6-axis sensors
- 강조 기능 :
- 알루미늄 합금 소재의 CNC 프레스로 만든 케이스로 밝고 튼튼함
- 빌트인으로 분리된 추가 IMU
- 모두 16 PWM 출력 채널 (8 main + 8 aux)
- flow 연결을 위한 추가로 1개 I2C 포트
- companion computer 연결을 위한 추가로 1개 USB 포트 (built-in UART-to-USB 컨버터)
- 개발용으로 debug 포트 제공
바로 시작하기
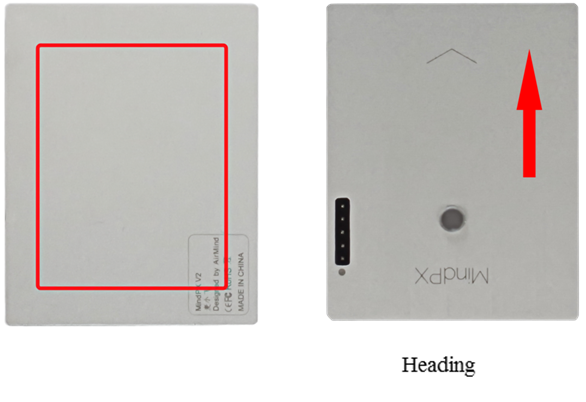
Mounting
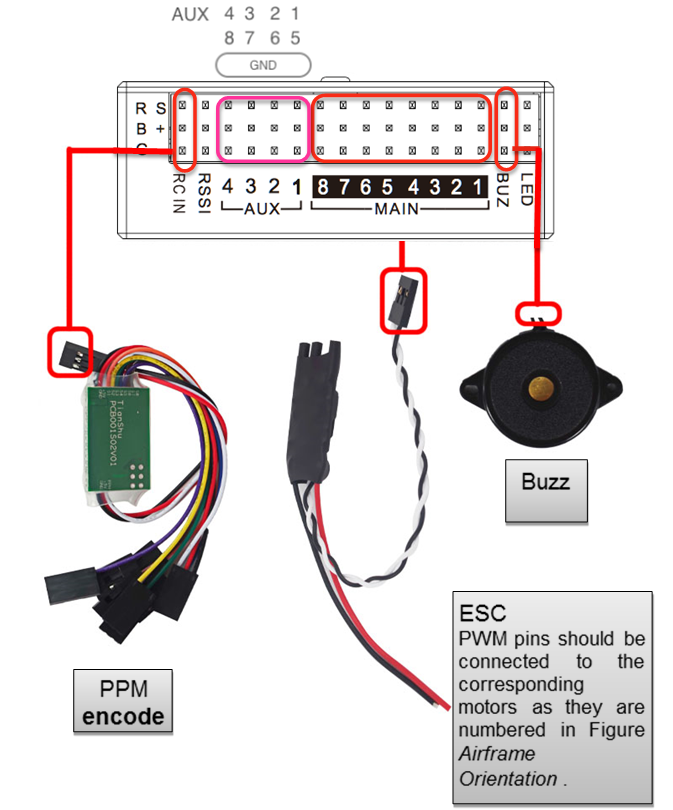
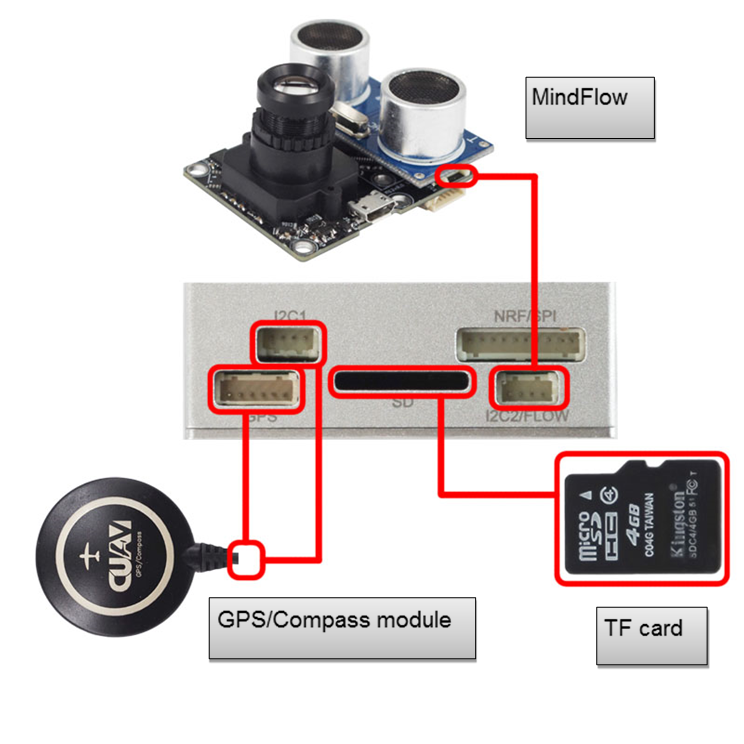
Wiring
Pin
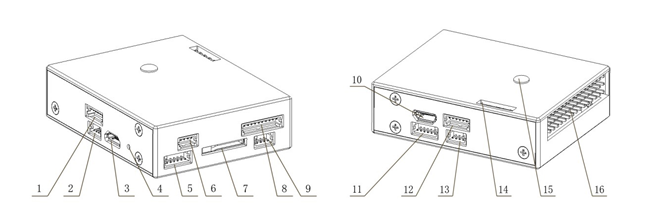
| Num. | Description | Num. | Description |
|---|---|---|---|
| 1 | Power | 9 | I2C2 (MindFLow) |
| 2 | Debug (refresh bootloader) | 10 | USB2 (Serial 2 to USB) |
| 3 | USB1 (refresh firmware) | 11 | UART4,5 |
| 4 | Reset | 12 | UART1 (Telemetry) |
| 5 | UART3 (GPS) | 13 | CAN |
| 6 | I2C1(external compass) | 14 | ADC |
| 7 | TF card slot | 15 | Tricolor Light |
| 8 | NRF/SPI(Remote Control) | 16 | Looper |
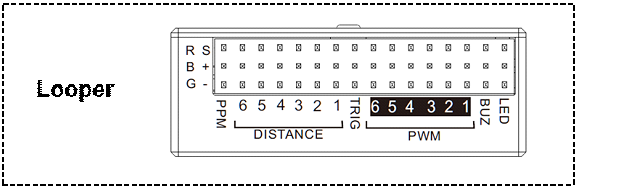
Radio Receiver
MindPX는 PPM/SBUS/DSM/DSM2/DSMX와 같이 다양한 라디오 수신기를 지원합니다.(V2.6 버전 이후) MindPX는 FrSky의 양방향 텔레메트리 D와 S.Pot를 지원합니다.
상세 Pin 다이어그램은 사용자 가이드를 참조하세요.
빌드 방법
Getting Started와 Building the Code을 따라하세요.
그리고 MindPX에 대한 target명령은 nuttx_mindpx-v2_default로 다음과 같습니다 :
make nuttx_mindpx-v2_default
Companion PC 연결
MindPX는 USB-TO-UART 브리지 IC가 보드에 포함되어 있습니다. micro-USB to USB type A 케이블을 사용해서 연결합니다. micro-USB 끝을 MindPX의 'OBC' 포트에 연결하고 USB type A 끝을 companion 컴퓨터에 연결합니다.
그리고 최대 BAUD rate는 px4 계열과 동일하며 최대 921600까지 지원합니다.
사용자 가이드
사용자 가이드는 다음 링크를 참고하세요.
구매하기
인터넷 AirMind Store에서 MindRacer를 구매할 수 있습니다. Amazon이나 eBay에서도 가능합니다.
지원
보다 상세한 정보는 http://www.mindpx.org 에서 찾을 수 있습니다. 문의나 도움이 필요한 경우 support@mindpx.net로 전달해 주세요.